Taylor Howell
Research
CV
Projects
Travel
Log
Contact
Blog
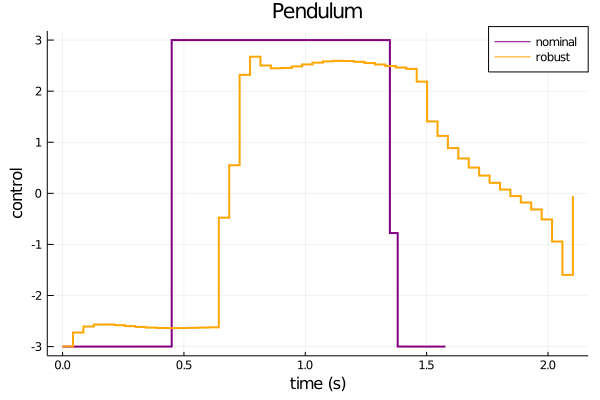
DIRTREL.jl
This is an open-source implementation of a robust feedback motion planning tool,
DIRTREL
, written in Julia. The implementation is available
here
.