Scaled Magnetic Helical Swimmers
At the Telerobotics Laboratory, I designed and fabricated scaled, magnetic helical swimmers. Each swimmer has an embedded magnet that enables it to be actuated with a rotating uniform magnetic field generated by a tri-axial Helmholtz coil system. I wrote C++ code and modified an existing library for the coils to sweep through rotating frequencies in order to control these swimmers.
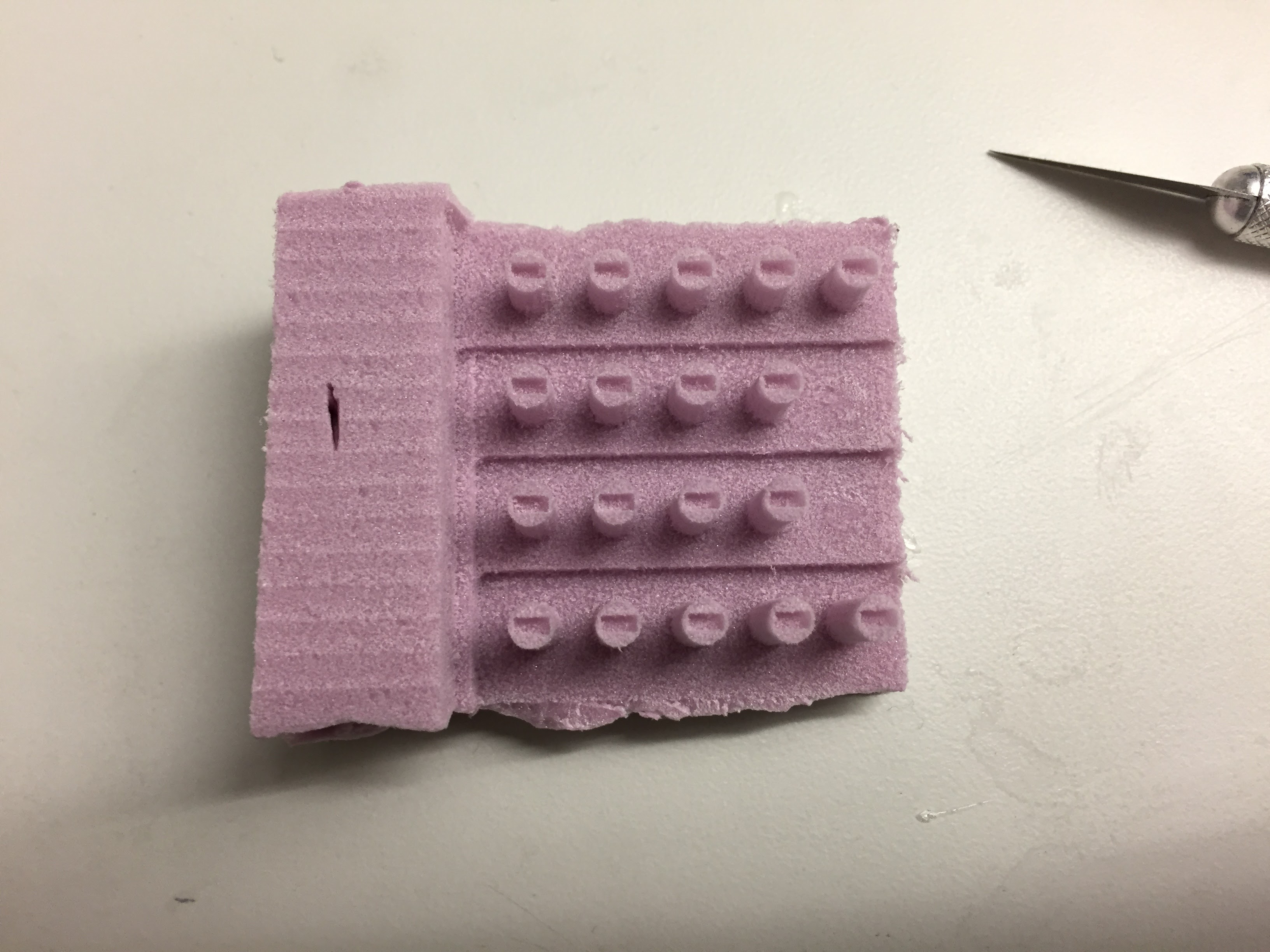
Swimmer heads machined from foam.
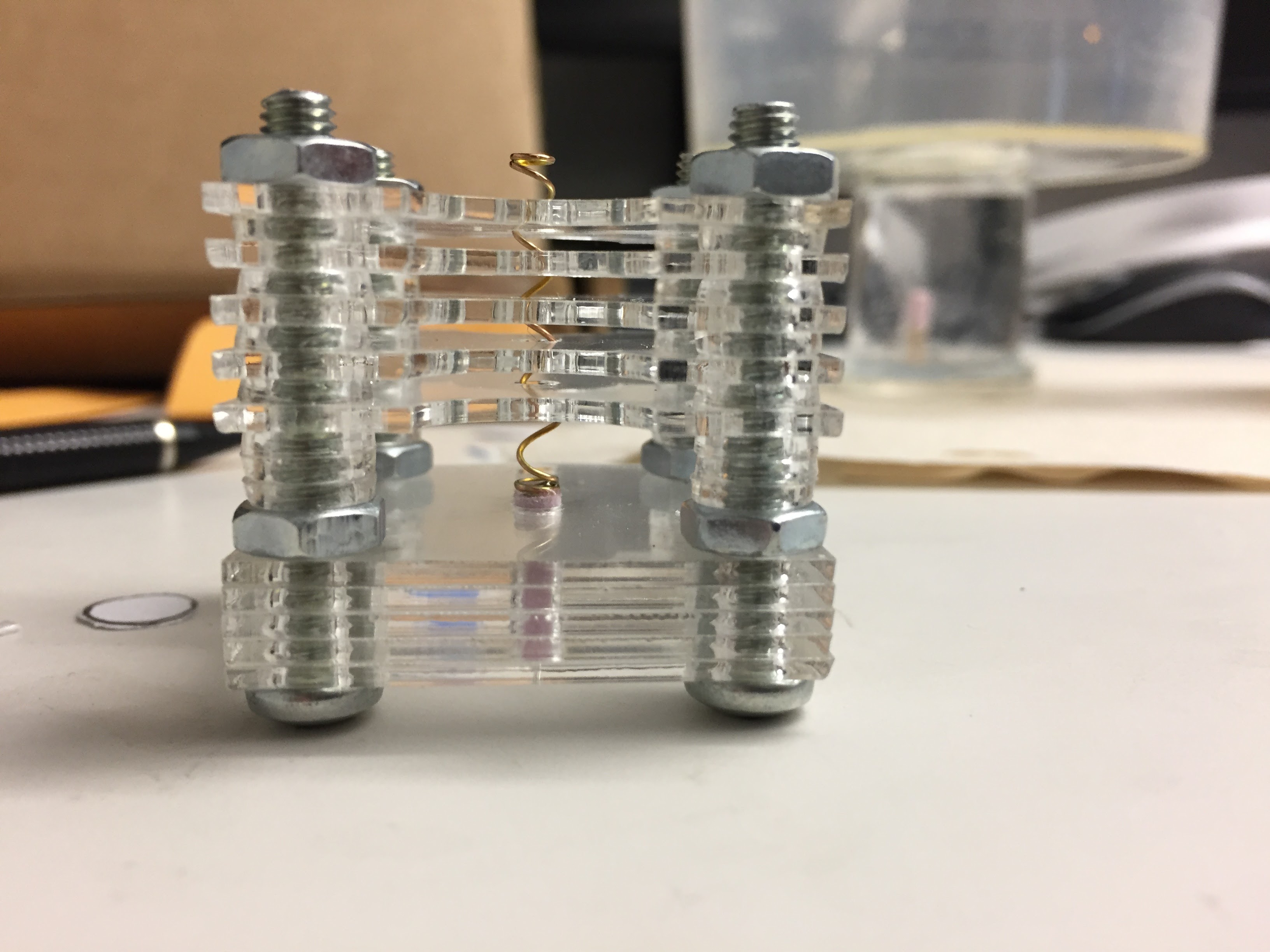
Swimmers assembled in custom jig.